
Project CETI is using robotics, machine learning, biology, linguistics, natural language processing, and more to decode whale communications.
Punyo is a soft robot from TRI designed for whole-body manipulation

TRI’s Punyo humanoid robot can manipulate objects with its whole body, giving it more flexibility when it comes to household tasks.
USC develops origami-inspired sensors for soft robotics

The USC team built a 3D structure of electrodes that converts stretch and release to a process of folding and unfolding.
Soft Robotics mGripAI uses simulation to train in NVIDIA Isaac Sim

Soft Robotics applies NVIDIA Isaac Sim’s synthetic data to food processing automation in efforts to improve safety and increase production.
Video podcast episode featuring interview with Tatum Robotics founder

This special video podcast episode features an American Sign Language translated edition of The Robot Report Podcast episode 98, an interview with Tatum Robotics founder Samantha Johnson.
Soft Robotics picks up $26M

Soft Robotics brought in $26 million in the first closing of its Series C funding round to expand commercial deployment of its mGripAI.
Harvard researchers create soft, tentacle-like robot gripper

Researchers at Harvard have created a tentacle-like gripper that can grasp irregularly shaped or soft objects without damaging them.
MIT CSAIL creates materials that can sense the way they move
The CSAIL team hopes their technology can be used to create wearable devices that provide feedback on how the user is moving.
MIT CSAIL develops robotic gripper that can feel what it grabs
CSAIL’s Perceptual Science Group created touch sensors for their gripper, allowing it to feel with the same sensitivity as human skin.
Researchers aim to create soft, shape-changing robots
The researchers are hoping to create robots made from many individual units that act individually but cooperatively.
Soft actuators help MIT power nano drones
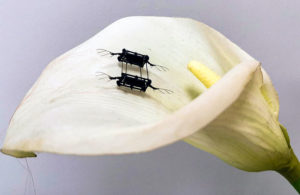
The robots could be used in swarms to pollinate a field of crops, or to search for survivors in disaster areas.
NCSU researchers make faster thermal actuator
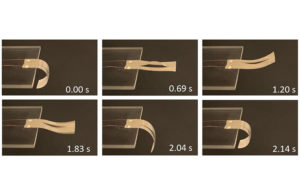
The key to the team’s actuator’s quick movements is in its bi-stable design, and the shape it prefers depends on the temperature.
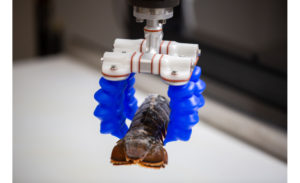
These robotic grippers are inspired by insects

A research team from five different universities developed robotic grippers inspired by insects that are able to handle delicate objects.
Inflatable robotic hand gives amputees real-time tactile control

A computer model relates a finger’s desired position to the corresponding pressure a pump would have to apply to achieve that position. Using this model, the team developed a controller that directs the pneumatic system to inflate the fingers.
Watch a soft robotic hand play Super Mario Bros.

Guided by a set program that autonomously switched between off, low, medium, and high pressures, the robotic hand was able to press the buttons on the controller to successfully complete the first level of Super Mario Bros. in less than 90 seconds.
TRI shares design of Soft Bubble Gripper to advance technology

The Soft Bubble Gripper uses visuo-tactile sensing techniques that allow a robot to recognize objects by shape, track their orientation in its grasp and sense forces as it interacts with the world.
Soft Robotics adds JMP Solutions to integrator program
Soft Robotics has added JMP Solutions to its Preferred System Integrator program. This partnership will help expand robotic adoption in the food sector enabled by Soft Robotics food-grade soft gripping, 3D vision, and AI technologies. Soft Robotics Preferred System Integrator Program is an initiative to help integrators win more business with its industry-leading technologies, including…
Deep learning optimizes sensor placement for soft robots

There are some tasks traditional robots – the rigid and metallic kind – simply aren’t cut out for. Soft-bodied robots, on the other hand, may be able to interact with people more safely or slip into tight spaces with ease. But for robots to reliably complete their programmed duties, they need to know the whereabouts…
Designing a quadruped controlled & powered by pneumatics

This quadruped developed at UCSD relies on a series of valves that open and close in a specific sequence to walk.
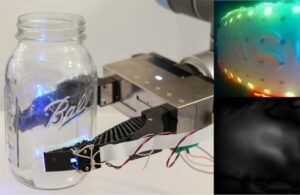
How shadows can help robots understand human touch

Cornell University researchers created a low-cost method for soft robots to detect a range of physical interactions, from pats to punches to hugs, without relying on touch at all. Instead, a USB camera located inside the robot captures the shadow movements of hand gestures on the robot’s skin and classifies them with machine-learning software. The…
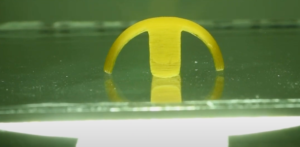
How pole beans inspired this soft robotic gripper

Scientists often look to nature for cues when designing robots – some robots mimic human hands while others simulate the actions of octopus arms or inchworms. Now, researchers in the University of Georgia College of Engineering have designed a new soft robotic gripper that draws inspiration from an unusual source: pole beans. While pole beans…
Soft robot inspired by sea creatures can walk, roll, and transport cargo
Northwestern University researchers have developed lifelike soft materials that could be used as microscopic delivery systems for production of fuels and drugs, environmental cleanup, or transformative medical procedures.