
MIT AI experts have applied a deep-learning model that can decongest robots nearly four times faster than typical strong random search methods.
AI job automation will happen gradually, says MIT CSAIL

MIT CSAIL’s research examines the economic practicality of using AI for automating tasks, with a particular emphasis on computer vision.
Multiple AI models help robots execute complex plans

A multimodal system uses models trained on language, vision, and action data to help robots develop and execute plans for household, construction, and manufacturing tasks.
Ddog project at MIT connects brain-computer interface with Spot robot

Project Ddog aims to turn a Boston Dynamics Spot quadruped into a basic communicator for those with physical challenges such as ALS.
5 takeaways from Universal Robots’ open house

Universal Robots had strong attendance at its U.S. headquarters open house, which featured presentations, demonstrations, and networking.
Kate Darling on the future of robotics and AI ethics

Dr Kate Darling discusses her new role leading AI and Robotics Ethics at the AI Institute.
MIT researchers help robots use their whole body to manipulate objects

An MIT research team has developed an AI technique that allows robots to manipulate objects with their entire hand or body, instead of just their fingertips.
MIT framework allows robots to learn faster in new environments

MIT researchers developed a framework that helps robots learn faster in new environments without needing a user to have technical knowledge.
These tiny soft robots can be controlled with weak magnets
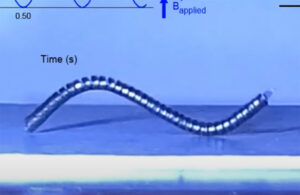
The soft robots are formed from rubbery magnetic spirals and can be programmed to walk, crawl, and swim in response to a magnetic field.
MIT researchers create algorithm to stop drones from colliding midair

Robust MADER is able to generate collision-free trajectories for drones even when there is a delay in communications between agents.
MIT researchers create implantable robotic ventilator
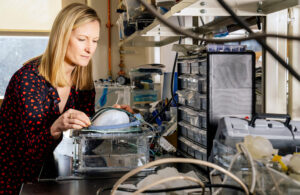
Researchers at MIT have designed a soft, robotic implantable ventilator that can augment the diaphragm’s natural contractions.
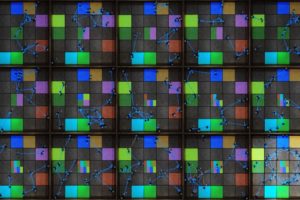
MIT researchers build swarms of assembling robots

Researchers at MIT have created assembling robots that are made up of the same components they use to build structures.
MIT helps robots retrieve objects buried in a pile

Researchers at the MIT developed a system that can help robots retrieve target items from a pile of items with some RFID tags.
MIT CSAIL releases open-source simulator for autonomous vehicles
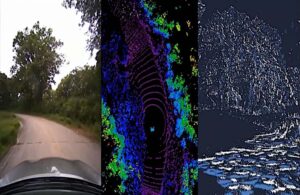
Researchers at MIT’s CSAIL released an open-source simulation engine that can construct environments to test autonomous vehicles.
MIT researchers help robots navigate uncertain environments
MIT’s research team hopes that its findings could help autonomous robots explore remote exoplanets with unknown conditions.
MIT CSAIL develops robotic gripper that can feel what it grabs
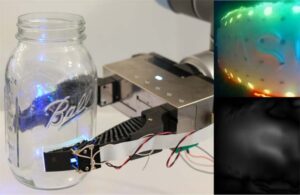
CSAIL’s Perceptual Science Group created touch sensors for their gripper, allowing it to feel with the same sensitivity as human skin.
Cynthia Breazeal named dean of digital learning at MIT

The former Jibo founder and CEO is also a professor of media arts and sciences at MIT.
Soft actuators help MIT power nano drones
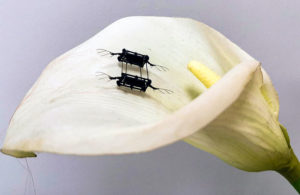
The robots could be used in swarms to pollinate a field of crops, or to search for survivors in disaster areas.
Meet Oystamaran, MIT’s oyster-flipping robot

Workers at Ward Aquafarms flip thousands of oyster bags that could weigh up to 70 lb, while dealing with rough waters and bad weather. MIT is building a robot to help.
Can blockchain secure communications for robot fleets?
Researchers hope to create new security systems for robots using transaction-based interactions as a way to build trust between humans and groups of robots.
Amazon, MIT establish Science Hub for robotics research

The primary goals are to ensure the benefits of AI and robotics are shared broadly and to promote participation in research.
Training drones to avoid obstacles at high speeds

MIT developed a high-speed flight-planning algorithm that combines simulations and experiments, in a way that minimizes the number of experiments required to identify fast and safe flight paths.